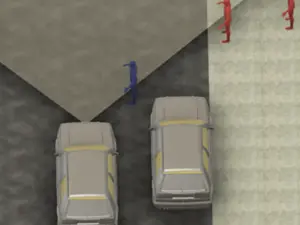
Die Funktionalität von künftigen Fahrerassistenz-, Automatisierungs- und Sicherheitsfunktionen muss permanent gegeben sein, um die Unterstützung des Fahrers und den Schutz der Insassen und anderer Verkehrsteilnehmer zu gewährleisten. Die vorausschauende Fahrzeugsensorik muss daher unter allen Umweltbedingungen ihr Umfeld verlässlich sowie robust erfassen.
In C-ISAFE werden dafür Umwelteinflüsse wie Regen, Nebel und Sonnenstände in der Indoor-Versuchsanlage mit eigens dafür entwickelten Versuchsanlagen für Witterung sowie Licht simuliert. Dies ermöglicht Witterungseffekte und -einflüsse auf die Sensoren erforschen und testen zu können.